Is there a green box satisfying a set of “constraints”?
Understanding the set of solutions
000000
000001
000010
000011
000100
000101
000110
000111
001000
001001
001010
001011
001100
001101
001110
001111
010000
010001
010010
010011
010100
010101
010110
010111
011000
011001
011010
011011
011100
011101
011110
011111
100000
100001
100010
100011
100100
100101
100110
100111
101000
101001
101010
101011
101100
101101
101110
101111
110000
110001
110010
110011
110100
110101
110110
110111
111000
111001
111010
111011
111100
111101
111110
111111
Open every box?
Works, but costly.
Open every green box?
Still costly: full materialization.
Is there a middle
ground between implicit and fully
explicit?
Count the green boxes? Pick a green box uniformly at random. Find
every green box. Find “the best” green box. Count the green boxes
starting with 0
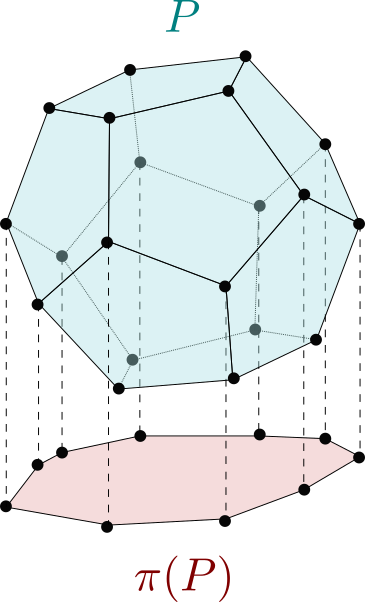
From implicit definition to ?
List of constraints:
has an even number of
.
has an odd number of
.
Solutions are described by circuits using Cartesian products and
(possibly disjoint) unions!
Here we can deduce that there are
solutions!
Circuits Zoo
DNNF -circuits
x
y
0
0
0
1
0
2
1
0
1
1
1
2
deterministic
DNNF -circuits
decision
DNNF -circuits
x₁
x₂
x₃
0
0
0
1
2
1
2
2
2
…
allows for counting!
Knowledge Compilation Map
Visualize the properties of each circuit class:
Gates
Boolean Domain
Enum
Count
Condition
Complement
…
DNNF
☑
❌
✅
❌
d-DNNF
✅
✅
✅
❌
dec-DNNF
✅
✅
✅
❌
FBDD
✅
✅
✅
✅
The goal of knowledge compilation is to build,
exploit and understand the limits of compact yet
tractable representations of an implicitly defined set.
Selected Contributions
Building small representations
New algorithms inspired by model counting with Bova, Mengel, Slivovsky
New
canonical datastructure called TDD. with Choi, Mengel, Muñoz, Van den Broecke
New
analysis of exhaustive DPLL . with Carmeli, Irwin, Salvati
Lower bounds and limits
Lower bounds and communication complexity with Bova, Mengel, Slivovsky
Sharp lower bounds based on treewidth. with Amarilli, Monet, Senellart
Finding new applications
Applications to certifying model
counters. with Lagniez,
Marquis
Solving linear programs over databases. Nicolas Crosetti’s thesis with Niehren, Ramon,
Tison
Applications to direct access Oliver Irwin’s thesis Salvati
Applications to optimization
problems. with Del Pia and Di
Gregorio
Building Circuits
Constraints
Input: constraints
.
.
Output: the set of assignments of variables
satisfying every constraint
0
0
0
1
2
1
0
0
0
2
2
3
0
2
1
0
1
2
0
0
2
0
1
0
0
1
2
0
0
0
2
1
3
Boolean functions: CNF formula, ie, constraints of the form
Database: joining tables
Materialization can be costly. Can we avoid it by constructing
circuits?
Building circuits Top Down
Branching algorithm known as exhaustive DPLL:
Exhaustive DPLL in practice
Used in practice by many knowledge compiler (d4, sharpSAT,
sharpSAT-TD, Ganak etc.).
SAT solver calls to cut dead branches.
Use learnt clauses to find unit literals to propagate.
Heuristics for picking the next variable.
Exhaustive DPLL and Databases
Collaboration with Oliver Irwin during his thesis :
Exhaustive DPLL gives an efficient algorithm for computing database
join queries with negations
Size of the circuit: depends on the order
chosen on variables.
Size bounds of the form
where
.
Circuits allow to recover the
tuple wrt lexicographical order in time
.
Optimal complexity under reasonable complexity assumption.
In this case, the circuit behaves as a compressed table with
efficient indexing.
Generalizes and unify previous results by Bringmann, Carmeli,
Mengel.
Building circuits bottom-up
OBDD:
-circuits
with a total order on variables
OBDDs enjoy two properties:
Given OBDD
,
we can produce a new OBDD computing
of size
.
Given an OBDD
,
we can produce an equivalent minimal canonical OBDD.
pi = order(F) # choose a "good" orderd = OBDD(1, pi)for c in F: d2 = OBDD(c, pi) # create an OBDD for the clause d.apply(d2) # apply the clause d.minimize() # minimizereturn d
Generalizing OBDD
OBDD are not succinct enough: path structure misses a lot of
decompositions.
Tree Decision Diagrams (TDD): a new treelike generalization of OBDD.
Chapter 2 of the manuscript; accepted at SAT26
with YooJung Choi, Stefan Mengel, Martín Muñoz, Guy Van den
Broecke
Determinism
TDD must respect the following determinism condition: a pair of
siblings can be the input of at most one parent node.
Wonderful TDDs
TDD can be minimized into a canonical form by iteratively merging
twin nodes.
TDD support apply.
T = vtree(F) d = TDD(1, T)for c in F: d2 = TDD(c, T) d.apply(d2) d.minimize() return d
Efficient bottom-up compilation
More succinct than OBDD, simpler than SDD
Can efficiently represent bounded treewidth
instances
Proof by upper bounding the canonical TDD size.
Gives insight on how to choose the vtree
TiDiDi compiler: promising experimental results.
Certifying #SAT Solvers
Trusting the tools
CNF Formula
…
SAT solver
SAT because
is a model
UNSAT Proof deriving a
contradiction
CNF Formula
…
#SAT solver
42 models Why?
Proving that
has 42 models:
List 42 models
Prove that they are the only ones.
Does not scale
Give a succinct representation
of all models
Prove that
represents exactly the models of
Closer to how #SAT solvers work.
Getting a succinct representation
Many #SAT solvers build (implicitly) a
-circuit
by applying Exhaustive DPLL.
CNF Formula
#SAT solver
8 models
Certifying the model count boils down to certifying that the circuit
has the same models as the CNF.
Hardness of proving equivalence
Given a CNF formula
and the circuit
produced by a #SAT-solver:
Checking
is easy (PTIME) by checking
.
Checking
is hard (coNP-hard): UNSAT formulas are
represented by
.
We need a device for making
easy to check.
Annotating
-gates
We want to check
or equivalently
:
explain
-gates!
kcps proof system! [SAT,
2019]
Syntactic Entailment
Circuits produced by #SAT-solvers on input
have a specific form:
Caching is syntactic, based on equivalence.
Each gate maps to a recursive call / subformula of
.
Can be checked in ptime.
We use this idea to output certify d4[C., Lagniez, Marquis, AAAI 2021].
.
Proof System Landscape
Many proof systems for #SAT boils down to certifying
.
Insight of Chapter 3 and [Beyersdorff, Hoffmann, Kasche 2026]:
MICE is a particular form of syntactic equivalence